
Adjustment needed to localizer capturing
-
I have been enjoying re-discovering this old favourite.
One thing that doesn't seem to have been changed with the big update, is the tuning of the autopilots localizer tracking. Generally on a standard 30 degree angle intercept at normal speeds, the autopilot will start turning early and too far to intercept the localizer. Typically it seems to stabilise at least one dot away for a long time, and just slowly fly at this offset angle. Of course, as you get closer this means the autopilot slowly starts approaching the centreline and you can get to an acceptable position in the end, but it takes a lot of distance. Typically I end up taking over manually instead or forcing it back on an intercept course in heading mode before switching back to get a better result. Flying into EDDB and today and being vectored in all the way ~18 NM out, it meant that the plane was initially more closely aligned with the parallel runway. Obviously this can be an issue with parallel runway operations.So it could do with some tuning to reduce this steady state error or overdampening. Glideslope tracking isn't phenomenal either, but you have more opportunity to help it along by throttle manipulation, so it is generally less problematic.
And yes it is an old plane, but it is still supposed to be CAT II capable.
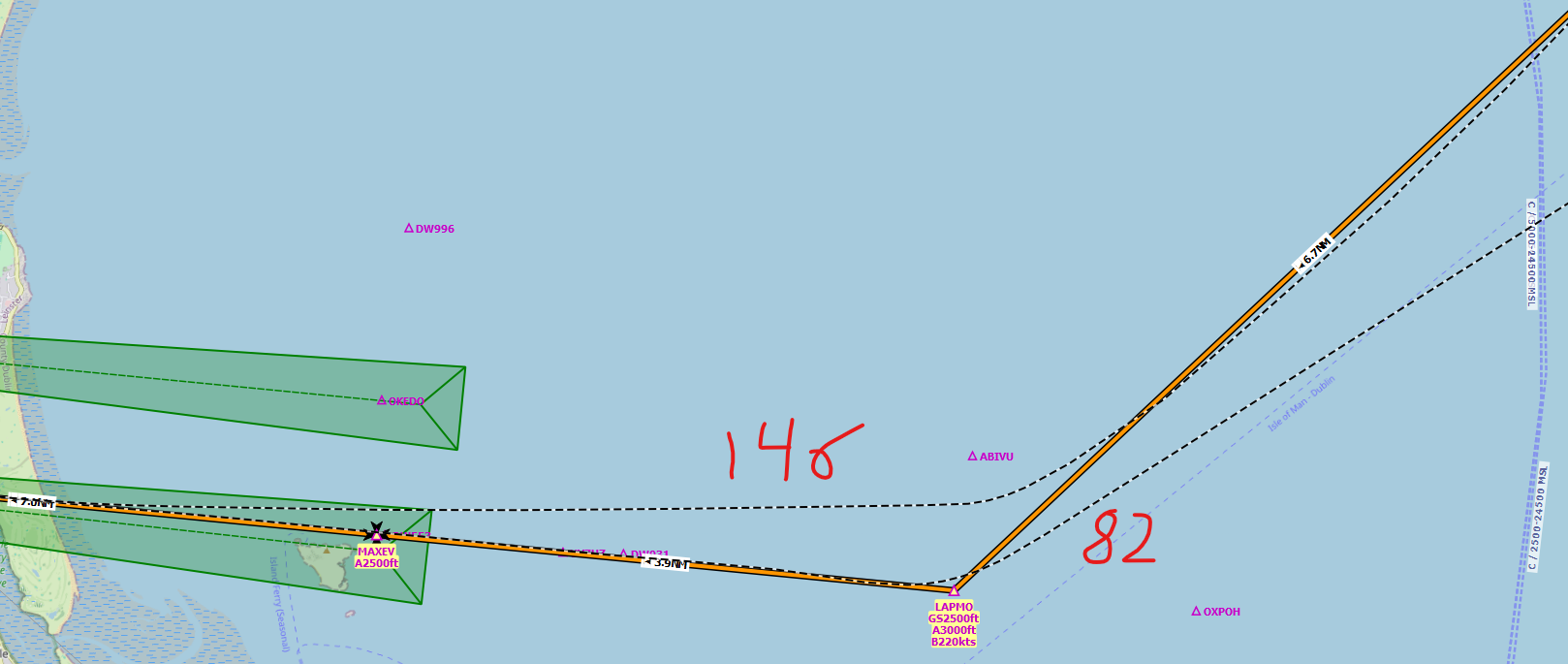
Here is a comparison of the flightpaths of a 146-200QC and MD-82 into 28L at EIDW. The 146 spent at least 6 NM before finally reaching the centreline.
-
Thanks for the feedback. We do have this logged on our internal trackers as it is something we would like to improve too. It's something that would involve a significant amount of development time to rewrite the code behind this logic, so we wouldn't be able to provide any timeframes for when an improvement may make its way into an update, but it is on our radar.
Mark - Just Flight